从零构建全栈 WebGIS 系统:基于 Flask + PostGIS + Leaflet 的地名与路径规划平台
为什么要做这个系统?
地名是承载空间、自然与文化信息的重要地理标识。然而,传统的地名管理往往依赖人工或重型桌面端 GIS 软件,存在信息更新滞后、多端共享困难等痛点。
为了探索更轻量、高效的空间数据管理模式,我独立全栈开发了这套基于 B/S 架构的地名与路径规划管理系统。系统彻底打通了从底层空间数据库(PostGIS)、后端业务逻辑(Flask)到前端动态交互(Leaflet + Vanilla JS)的数据流,并自主集成了基于真实路网的 Dijkstra 最短路径计算功能。
1. 核心架构与技术栈
系统采用经典的前后端分离 B/S 架构,开发流完全在本地/云端虚拟环境(venv)中隔离,确保了极高的可移植性。
- 前端交互与地图渲染:HTML5 / CSS3 / JavaScript, Leaflet.js (集成 MarkerCluster 聚合插件处理海量点位)。
- 后端 API 与核心逻辑:Python (Flask), 提供跨域 (CORS) 支持的 RESTful API。
- 空间数据库底座:PostgreSQL + PostGIS,原生支持空间索引与
ST_AsGeoJSON等空间查询函数。 - 路径规划算法层:基于 OSMnx 与 NetworkX 解析 OpenStreetMap 真实路网,自主实现 Dijkstra 算法。
graph TD
A[前端浏览器 UI / Leaflet Map] <-->|AJAX / GeoJSON / REST API| B(后端 Flask Web Server)
B <-->|SQL / psycopg2| C[(PostgreSQL + PostGIS 数据库)]
B <-->|起点/终点 坐标| D[路径规划模块 path_finding.py]
D <-->|读取| E((南通市 OSM 路网图 graphml))
2. 空间数据库设计与互操作
数据的核心在于 PostgreSQL + PostGIS。针对地名数据,我设计了 place_info 表,除了常规的属性字段(ID、名称、省市县)外,重点维护了空间坐标(经纬度)。
后端如何与 PostGIS 优雅交互?
在后端的 access_DB.py 中,我并没有只取属性数据,而是利用 PostGIS 的强大空间函数,直接在 SQL 查询阶段将几何数据转化为前端可以直接使用的 GeoJSON 格式:
1 | |
这种处理方式极大减轻了后端的序列化负担,前端拿到数据后可直接通过 L.geoJSON() 加载。
3. 核心突破一:海量地名 CRUD 与地图动态聚合
本系统不仅是一个展示平台,更是一个管理平台。
- 双向数据绑定:前端数据表与地图标记完全同步。在数据表中新增、修改或删除某条地名数据(AJAX 异步请求),后端更新 PostGIS 后,前端地图上的 Marker 会立刻响应刷新。
- 海量点渲染优化:江苏省内地名数据庞大,直接渲染数万个 Marker 会导致浏览器 DOM 崩溃。我引入了
Leaflet.markercluster插件。在L_map.js中,将其封装为MarkerClusterGroup,在不同缩放级别下动态聚合点位,保障了地图滚轮缩放的丝滑体验。

图 1:基于 Leaflet 的地名空间聚合展示与属性弹窗
4. 核心突破二:基于真实路网的 Dijkstra 最短路径规划
这是系统中最具挑战性,也是最有意思(Geek)的功能。它不同于直接调用百度/高德地图 API,而是从零实现基于矢量图结构的算法计算。
4.1 算法选型与实现
最短路径采用经典的 Dijkstra(迪杰斯特拉)算法,核心思想是通过贪心策略,不断更新起步节点到周围邻接节点的临时标号,直至找到终点。
4.2 工程化落地流程
在 path_finding.py 中,我完成了以下全链路开发:
- 路网预处理:使用
OSMnx提前下载并构建南通市路网的拓扑图对象(.graphml),将道路交叉口抽象为节点(Node),道路抽象为边(Edge)。 - 坐标捕捉(Snapping):用户在前端 Leaflet 地图上任意点击两个点,后端接收到坐标后,利用 KD-Tree 算法在拓扑图中找到距离这两个点最近的真实路网节点。
- 图遍历与路径回溯:使用
NetworkX和最小堆(heapq)实现高效率的 Dijkstra 算法遍历,计算出最短路径节点的序列,并将其转化为经纬度坐标串返回给前端。 - 前端绘制:前端利用
L.polyline将路径平滑渲染在地图上。
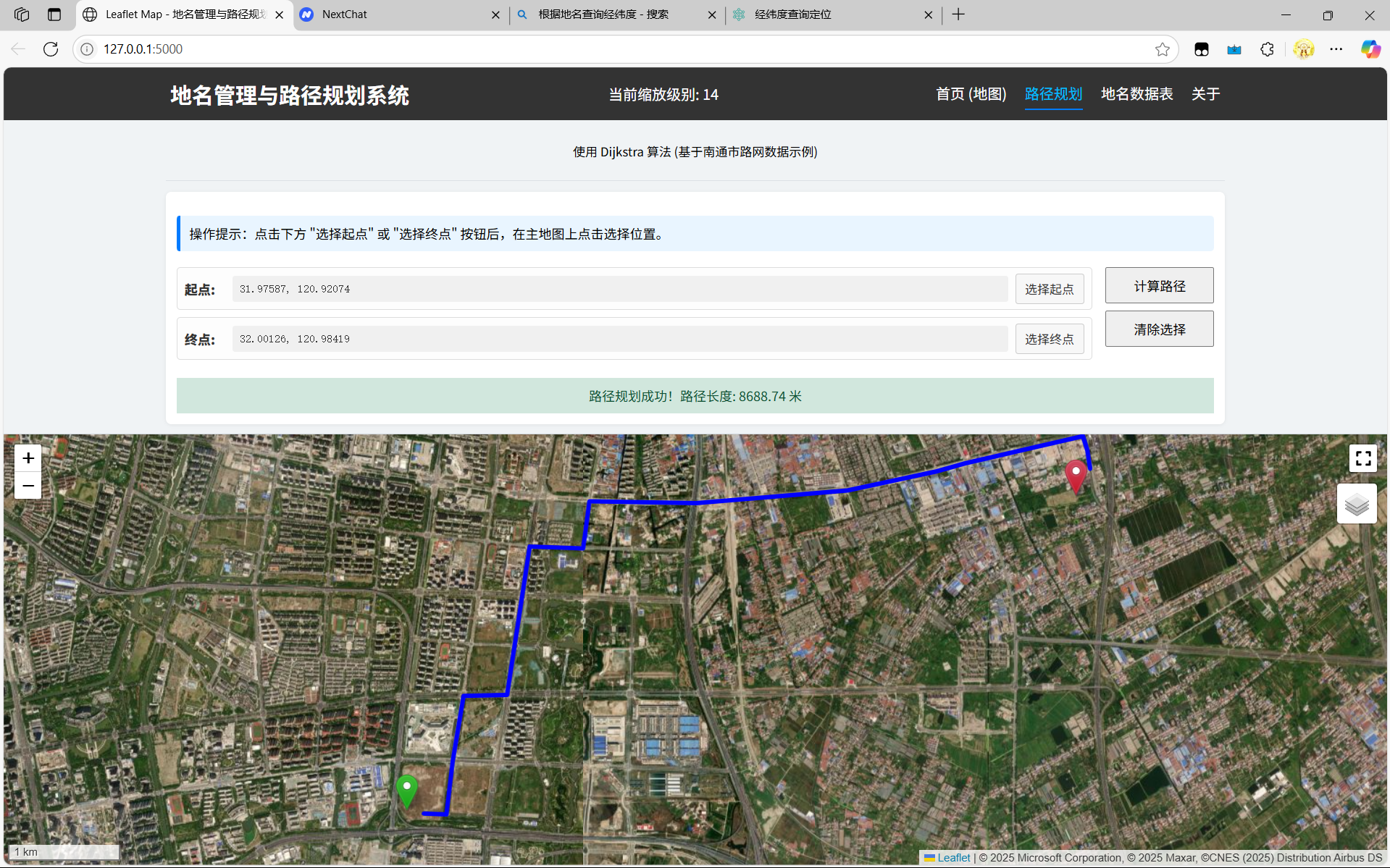
图 2:基于 Dijkstra 算法的真实路网动态最短路径规划效果
5. 项目总结:从业务到底层的全栈视角
开发这个地名管理系统,是我将 GIS 理论(空间拓扑/路径分析) 与 现代 Web 工程(API 设计/前后端分离/DOM 交互) 深度融合的一次成功尝试。
- 产品同理心:在设计地名属性修改功能时,我深刻体会到用户操作的便捷性要求。前端校验配合后端容错,才能打造稳健的 B 端管理系统。
- 技术深度探索:手写 Dijkstra 并对接实际的 OSM 路网,让我对“图计算”和“路径导航”的底层逻辑有了本质认识。这远比仅仅调一个第三方 API 接口有价值得多。
- 未来展望:目前系统尚未集成大型空间框架引擎,未来考虑将本地开发流迁移至 GitHub Codespaces 或 Docker 容器中,并结合 CI/CD 实现自动化部署,进一步践行云原生 WebGIS 开发流。